RoboticsBlog
About
RoboticsBlog
Categories
All
(7)
Code
(7)
DL
(1)
Manipulators
(1)
Python
(5)
RL
(3)
Robotics
(2)
SLAM
(1)
casadi
(1)
Non Linear Trajectory Optimization:Acrobat or Double Pendulum
casadi
Code
Python
Double pendulum have highly non linear dymanics. Thats why making controlling them and making them reach a desired state is an interesting control problem. In this…
Aug 4, 2023
Arpan Pallar
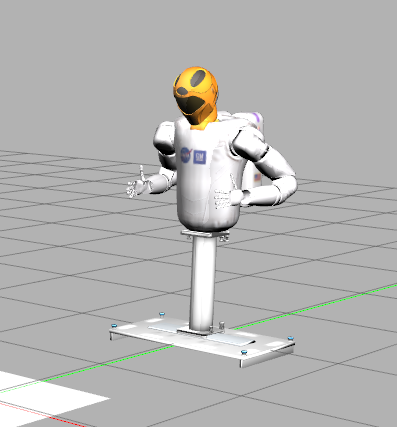
Controlling NASA’s R2 Robot
Robotics
Code
Manipulators
In this blog we ll generate write code to control…
Jun 18, 2023
Arpan Pallar
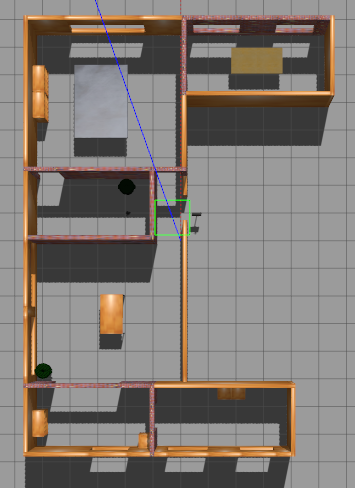
Implementing SLAM in ROS
Robotics
Code
SLAM
Here is a project on How to implement slam in ROS. This project explains how to interface with various sensors and actuators as well as how to develop your project step by…
Jun 18, 2023
Arpan Pallar
DDPG Implementation for Coders
RL
Code
Python
DDPG is a deepRL algorithm for agents…
Jun 16, 2023
Arpan Pallar
PPO Implementation for Coders
RL
Code
Python
PPO is state of the art algorithm for DeepRL. We ll see how this can be implemented in code(…
Jun 14, 2023
Arpan Pallar
Python and Numpy cheat sheet for DL
DL
Code
Python
A cheat sheet for common numpy and Python APIs you would see and require for deep learning based programming for robotics
Jun 10, 2023
Arpan Pallar
Pytorch and TensorFlowCheat Sheet for RL
RL
Code
Python
PyTorch provides
torch.Tensor
to represent a multi-dimensional array containing elements of a single data type
Jun 10, 2023
Arpan Pallar
No matching items